みなさまの応援は織田さんにも届いており、プレゼンまでのラストスパートを、日々、時速6kmの電動車いすで突っ走っております。
昨日は、豊洲にてプレゼンに向けての打ち合わせを行いました。
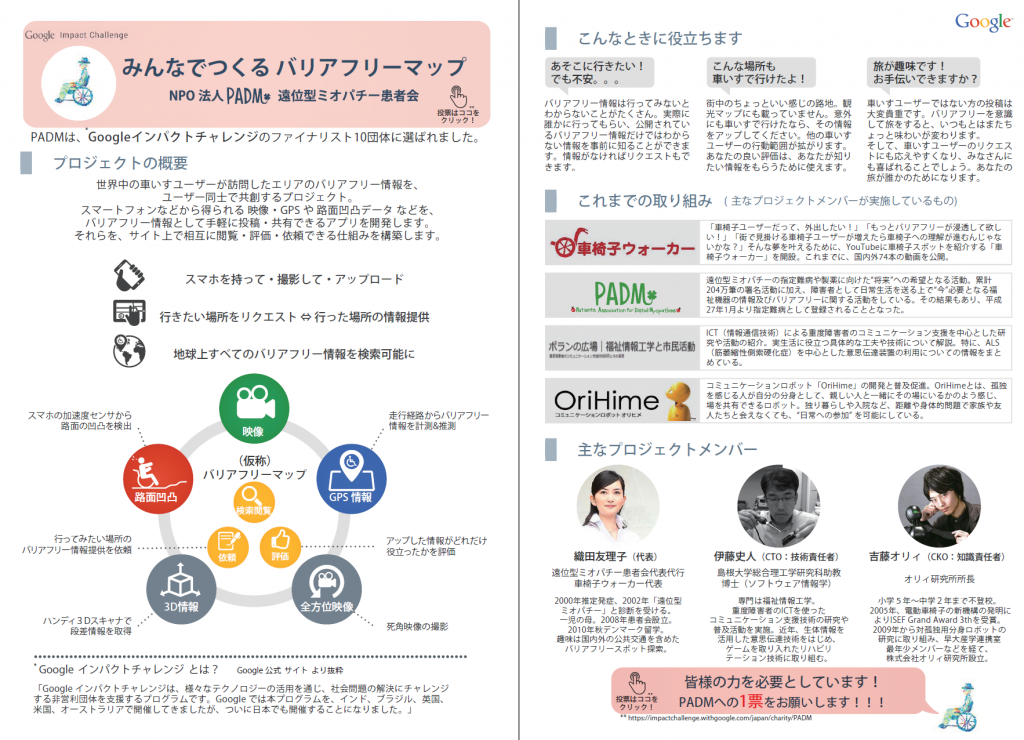
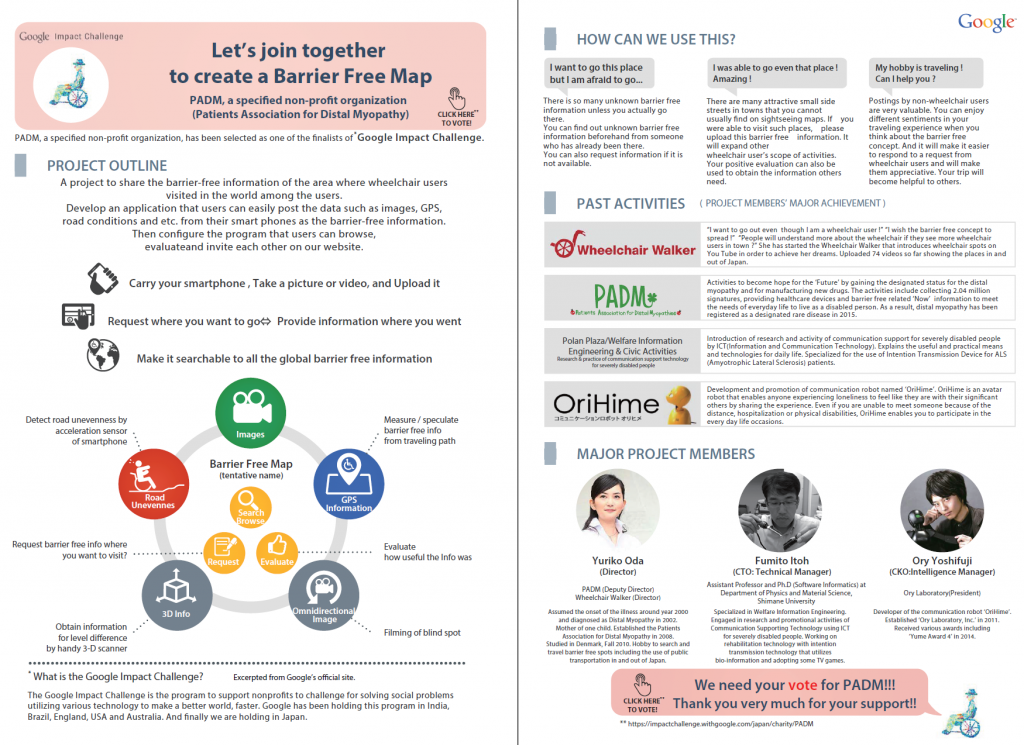
フィールドこそ違うものの、それぞれが障害者の社会参加に関係する活動を長年続けてきた強力なメンバーです。
このページをご覧になってくれた皆さまとも、「みんなでつくるバリアフリーマップ」プロジェクトを通じて、活動をともにしたいきたいと考えております。
今後とも応援のほどよろしくお願いいたします。


みなさまの応援は織田さんにも届いており、プレゼンまでのラストスパートを、日々、時速6kmの電動車いすで突っ走っております。
昨日は、豊洲にてプレゼンに向けての打ち合わせを行いました。
フィールドこそ違うものの、それぞれが障害者の社会参加に関係する活動を長年続けてきた強力なメンバーです。
このページをご覧になってくれた皆さまとも、「みんなでつくるバリアフリーマップ」プロジェクトを通じて、活動をともにしたいきたいと考えております。
今後とも応援のほどよろしくお願いいたします。

車いすを動かしながらスマホで周囲を撮影するのはたいへん難しいでしょう。また、撮影しながらの移動はたいへん危険です。
このプロジェクトでは、スマホやタブレットを車いすに取り付ける方法から提案します。もちろん、楽に確実にできる方法です。
これまでも、カメラ用のアームを使ったものがありました。しかし、車いすに取り付けた場合、邪魔になったりカメラ機能が使いにくくなるど問題がありました。固定してしまうと、スマホを自由に動かして周辺を撮影しにくくなる問題もあります。
そこで、私たちは、全方位撮影方法をはじめ、アームや電動雲台(うんだい)を新しく開発し、バリア&バリアフリー情報を撮影しやすい環境も提案していきます。
各団体のアイコンに使われている「つぶつぶの絵」。
なるほど、こうやって描かれていたのですね。
「みんなでつくるバリアフリーマップ」プロジェクトでは、3次元情報も大いに活用する計画です。
たとえば、Google ではこのような技術を開発しています。
Google Project Tango: https://www.google.com/atap/projecttango/#project
この映像を見ていただければ分かるように、そこを通るだけで段差を含めた形状情報が収集できます。
この3次元情報からは、段差の確認はもちろんのこと、車いすの走行シミュレーションさえも可能にします。
いずれこの技術は、タブレットやスマホにも搭載されます。
誰でも使えるようになるので、バリアフリー情報はもっと具体的(定量的)で分かりやすいものになっていくでしょう。
「ヨミドクター」にて、本プロジェクトについて坂上氏より紹介していただきました。
みんなで世界の「バリアフリーマップ」を作ろう
http://www.yomidr.yomiuri.co.jp/page.jsp?id=114736&from=tb

そんなことが重なると、出かける気力が失われ。。。

織田友理子さんのお守り「みんなでつくるプレゼン写真」は、現在(17日14時)のところ19枚のお写真が集まりました。
ありがとうございます。

本プロジェクト、知識責任者の吉藤オリィ氏によるコミュニケーションロボット Orihime。織田さん一家の利用シーンがオンエアされました。
偶然、ファイナリスト公表と同じ日の3月16日。
Orihime の基盤技術は、インターネット越しのサーボ制御、映像および音声の伝送です。もちろん、操作インタフェースやロボットの動きなどのインタラクションも重要です。
これらの基礎的技術は、本プロジェクトでも必要、いや必須です。本プロジェクトでは、バリアフリー情報を収集する際にスマホを保持する、「(仮称)インテリジェントアーム」を開発します。

車いすでも、一人で行ける!楽しい!